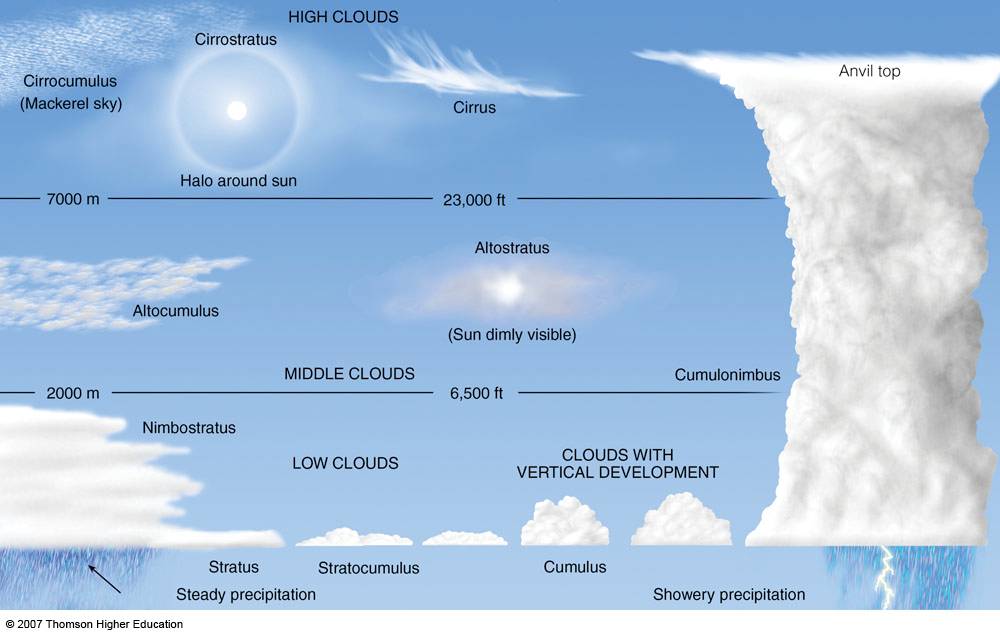
A human observer looks at the sky and estimates the coverage in 8ths , 0 being clear sky and 8 being overcast. The human observer then estimates cloud height and applies these estimates of cover for each layer. It is quite obvious that if there are no breaks in the sky, any higher layers present cannot be estimated. The human observer also suffers from the “packing” effect of an oblique line of sight , and usually tends to overestimate cover.
For each layer the human observer will give the condition FEW, SCATTER, BROKEN AND overcast.
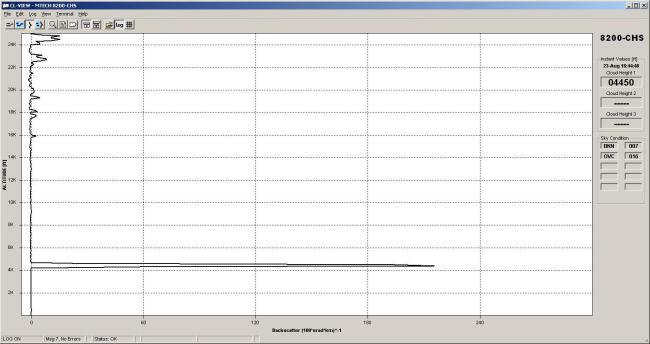
A ceilometer can only “see” cloud above it, so can only estimate the sky condition by analysing heights over a time period.
The Sky Condition Algorithm in the 8200-CHS is based on that developed by the US National Weather Service and used in their automated surface observing system (ASOS) units and guidelines published by the World Meteorological Organization.
A study by the Hughes STX Corp. found that when ceilings were under 5,000 feet, this algorithm agreed with the human observer 78% of the time. With fog, the comparability was 84%, with rain it was 69%, and when snowing 74%. During rain, the NWS Algorithm reported more changes than the human observer.
However at the transition between scattered and broken cloud coverage 4 oktas humans often report too much cloud coverage. This is attributed to the “packing effect;” a condition where an observer does not see the openings in the cloud decks near the horizon due to the viewing angle. Pilots tend to overestimate the coverage even more than ground observers because of visual compression.
The 8200-CHS algorithm is not biased by the “packing effect” because it measures only the sky conditions passing over the sensor
Details of the 8200-CHS specifications can be found here 8200-CHS Page