Like Rain, Snow produces quite high levels of backscatter. But the raindrops and snow flakes have very different shapes, velocities and surface area to mass ratios. More expensive ceilometers may have the ability to discriminate between snow and rain.
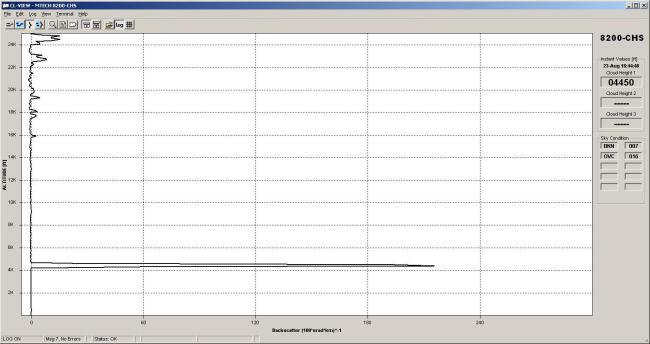
A typical LIDAR curtain plot for cloud appears below:

Ref: University of Utah Atmospheric Science
The snow is coming from a cloud at around 500m . The cloud and snow appear to extinguish the returns from higher layers, if any. Some of the snow is light and evaporates before it gets to ground level. ( low level green return )
Work has been done to try to determine snowfall rate from Lidar returns. According to Ed Eloranta of the University of Wisconsin Madison, the technique requires radar and does not require any knowledge of the snowflake shape.